
<html> <head><title>403 Forbidden</title></head> <body> <h1>403 Forbidden</h1> <ul> <li>Code: AccessDenied</li> <li>Message: Access Denied</li> <li>RequestId: 4YSJSYCZ0A1Y785T</li> <li>HostId: oQt49tTp32pQg7KnOiWcIYRygjXoWuopA7JNUOy6eESkJg07O9hSzJnmb2Qu9r+XVC7nougZjqA=</li> </ul> <hr/> </body> </html>
SPONSORS
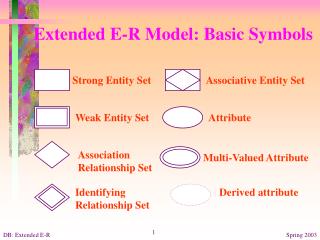 Amplified E-R Model: Basic Symbols
Amplified E-R Model: Basic Symbols
 Imposing business model Demand Curve
Imposing business model Demand Curve
 Hostile to Phishing Programming
Hostile to Phishing Programming
SPONSORS
SPONSORS
 3.2. Cournot Model
3.2. Cournot Model  IC91AD Programming
IC91AD Programming  The Multicore Programming Challenge
The Multicore Programming Challenge  Astana Medical University: Modern inventive model of the Integrity of Education, Science and Practice in Health care s
Astana Medical University: Modern inventive model of the Integrity of Education, Science and Practice in Health care s  Programming Engineering for Versatile Circulated Registering
Programming Engineering for Versatile Circulated Registering